Monica Ekal and Rodrigo Ventura. On the accuracy of inertial parameter estimation of a free-flying robot while grasping an object. Journal of Intelligent & Robotic System (JIRS), 2019.
Keenan Albee, Monica Ekal, Rodrigo Ventura, and Richard Linares. Combining parameter identification and trajectory optimization: Real-time planning for information gain. In Proceedings of Symposium on Advanced Space Technologies in Robotics and Automation (ASTRA 2019), Noordwijk, the Netherlands, 2019. ESA-ESTEC
Rodrigo Ventura, Pedro Roque, and Monica Ekal. Towards an autonomous free-flying robot fleet for intra-vehicular transportation of loads in unmanned space stations. In Proceedings of the International Aeronautical Congress (IAC), 2018.
Pedro Roque, Paolo Fiorini, and Rodrigo Ventura. MoonHopper: Conceptual design of an hopping robot for lunar exploration support. In Interactive presentation at the International Aeronautical Congress (IAC), 2018.
Monica Ekal and Rodrigo Ventura. An Energy Balance Based Method for Parameter Identification of a Free-Flying Robot Grasping An Unknown Object. In Proceedings of the IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC 2018), 2018.
Monica Ekal and Rodrigo Ventura. On Inertial Parameter Estimation of a Free-Flying Robot Grasping An Unknown Object. In Proceedings of the International Conference on Control, Decision and Information Technologies (CoDIT), 2018.
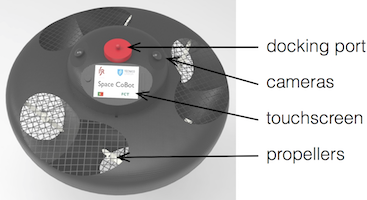
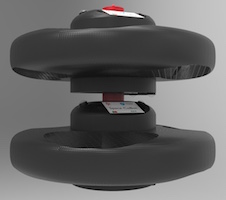
Pedro Roque and Rodrigo Ventura. A Space CoBot for personal assistance in space stations. In IJCAI Workshop on Autonomous Mobile Service Robots, New York, 2016. IJCAI.
Pedro Roque and Rodrigo Ventura. Space CoBot: modular design of an holonomic aerial robot for indoor microgravity environments. In IEEE/RSJ International Conference On Intelligent Robots And Systems (IROS), 2016.